






Учёные из нескольких российских институтов разработали прототип робота-птицы с независимыми крыльями и хвостовым оперением. Предполагается, что модель поможет в создании серийных биоморфных (созданных по аналогии с живым организмом) беспилотников. Её задача — выявить эффективные режимы полёта и протестировать методы управления аппаратом с помощью алгоритмов искусственного интеллекта.
Крылатый робот с дополнительными степенями свободы
Птицы во время полёта демонстрируют быструю и точную манёвренность, поэтому инженеры стараются перенять механику этих движений, чтобы воссоздать её в роботизированных устройствах. Они, к слову, называются орнитоптерами. С этой целью коллектив учёных из Московского физико-технического института, Нижегородского государственного университета им. Н. И. Лобачевского и Балтийского федерального университета им. И. Канта создал пернатого робота. Он имитирует движения птиц, независимо управляя каждым крылом и хвостом, меняя ширину размаха крыльев и положение хвостового оперения.
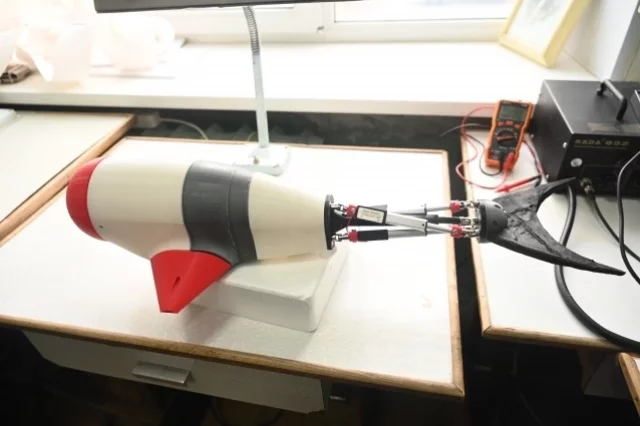
По словам разработчиков, уникальность их устройства в том, что у каждого крыла есть свой, отдельный комплект двигателя и микроэлектроники, управляющей движением. Это придаёт прототипу дополнительные степени свободы, позволяя воспроизводить разнообразные движения птицы в широком диапазоне. Благодаря этому робот меняет положение конечностей, что позволяет наблюдающим за ним учёным выявлять и исследовать оптимальные режимы манёвров и полётов.
«Прототип помогает сверять теоретические выкладки с реальными условиями, — объясняет руководитель лаборатории нейробиоморфных технологий МФТИ и заведующий кафедрой нейротехнологий ННГУ Виктор Казанцев. — Благодаря этой модели можно экспериментально проверить, какое влияние на аэродинамику оказывают постановка крыльев, частота взмахов или положение тела робоптицы в воздушном потоке».
Используя роботизированный макет, учёные, например, определяют, под каким углом лучше расположить крыло беспилотника, чтобы увеличить его подъёмную силу. Или как скорректировать положение туловища, чтобы ускорить или, наоборот, притормозить робоптицу.
Для чего нужны орнитоптеры?
Полученные в ходе испытаний данные важны для разработки систем управления орнитоптерами. Впоследствии их будут применять для первичного обучения нейросетей, которые станут основой «мозга» роботизированных птиц. Производство таких пернатых дронов когда-нибудь будет поставлено на поток.
«При создании природоподобных механических устройств нам неизбежно придётся иметь дело с большим количеством параметров, влияющих на полёт, — говорит Виктор Казанцев. — Задачу быстрого выбора оптимальных настроек для успешного маневрирования робоптицы в воздушном потоке можно решить с помощью нейросети. Такие программные алгоритмы сейчас проектируются».
По мере добавления новых настроек в ходе машинного обучения нейросеть будет усложняться. К ней можно будет подключать различные датчики и приборы для повышения информационной мощности системы. В итоге исследователи планируют разработать бортовой процессор с искусственным интеллектом, который будет устанавливаться в «мозг» серийных робоптиц.
К слову, подобные разработки ведутся и в других странах, прежде всего в Китае и США. Но наши учёные в этой гонке держатся на достойном уровне.
Для чего вообще нужны орнитоптеры? В будущем они смогут помогать учёным в проведении разного рода исследований. Например, наблюдать за стаями птиц, перенаправлять их подальше от опасных зон (допустим, отгонять от аэропортов), вести мониторинг территорий и даже перевозить с их помощью грузы.
Подписывайтесь на АиФ в  MAX MAX
|



