






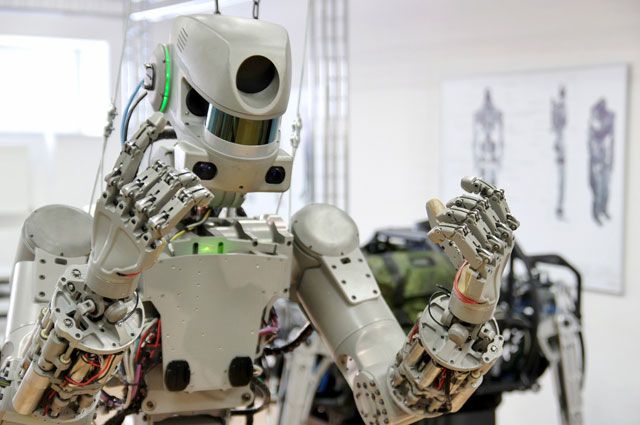
Применение роботов в разных сферах жизни — давняя мечта многих. Их предлагают активно использовать для работы по дому, для вождения автомобилей. Кроме того, сегодня разрабатывается и испытывается программа, в рамках которой роботы становятся помощниками для космонавтов. В чем перспективы этого направления и в чем должны помочь такие устройства, АиФ.ru рассказал Евгений Дудоров, к. т. н., лауреат премии правительства РФ в области науки и техники, исполнительный директор АО «НПО „Андроидная техника“».
АиФ.ru: Евгений Александрович, каковы перспективы развития антропоморфных роботов-помощников для космонавтов?
Евгений Дудоров: Для достижения стратегических целей российской пилотируемой космонавтики, в частности, освоения Луны, должны быть разработаны и апробированы в космических полетах технологии роботизированной операционной и транспортной поддержки деятельности космонавта. Эффективность данных технологий будет зависеть не только от технического совершенства роботов, но и от качества взаимодействия всех компонентов эргатической системы «космонавт — робот — среда деятельности».

— Что надо сделать, чтобы роботы могли работать успешно?
— Для расширения спектра задач, решаемых с помощью антропоморфных роботов-помощников космонавтов, потребуется достижение следующих целей:
- Обеспечение автономности АРП при выполнении определенного ряда рутинных операций;
- Обеспечение супервизорного управления АРП при решении нестандартных задач, в которых требуются целеуказания человека-оператора;
- Обеспечение мобильности АРП, предполагающей возможность его автономной навигации и перемещение в пространстве;
- Обеспечение возможности обучения АРП на примерах для адаптивного поведения в условиях неопределенности среды функционирования. Возможно, потребуется разработка так называемых «технологий обучения с учителем» на основе искусственных нейронных сетей;
- Совершенствование захватных устройств манипуляторов, приближение их функциональности к свойствам человеческих рук;
- Совершенствование педипуляторов или транспортной платформы для обеспечения самостоятельного перемещения АРП по поверхности Луны;
- Обеспечение способности АРП к самостоятельной активации из консервированного состояния хранения и обратной деактивации.
В целях повышения эффективности взаимодействия космонавтов с АРП потребуется совершенствование человеко-машинного интерфейса «космонавт-АРП». Для этого необходимо:
- Обеспечение человека-оператора эффективными обратными связями от сенсоров АРП (тактильных, силомоментных, визуальных, аудио), которые должны передаваться на органы контроля и управления;
- Создание эффективного управляющего экзоскелета с обратными связями, обеспечивающего человеку-оператору комфортное и интуитивно понятное копирующее телеуправление АРП;
- Создание эффективной информационно-управляющей системы на основе технологий смешанной реальности, которая обеспечивает передачу человеку-оператору информации действительной реальности, виртуальной и дополненной реальности (сенсорной, инструктивной и справочной информации) на очки типа Google Glass;
- Создание технологий многомодального (копирующего, голосового, жестового) интерфейса управления АР.
«НПО „Андроидная техника“» предложило дорожную карту развития технологий роботизированной поддержки деятельности космонавтов с помощью роботов-помощников.

— Ближайшие планы в этом направлении какие?
— Ближайшими целями являются разработка модернизированных, более технологичных АРП и их экспериментальная отработка в ходе космических экспериментов «Испытатель» и «Теледроид».
КЭ «Испытатель» будет продолжен в ходе полетов на ПТК «Федерация», предусматривающих также работы на РС МКС. В ходе работ на МКС предполагается использование модернизированных АРП и задающих устройств копирующего типа (ЗУКТ).
Кроме того, предполагается проведение нового КЭ «Теледроид» на борту РС МКС, который является развитием КЭ «Испытатель».
Для проведения КЭ «Теледроид» предполагается использовать модернизированного АРП для работы в условиях космического пространства.
Космический эксперимент «Теледроид» будет проводиться в три этапа:
Первый этап — отработка каналов телеуправления с использованием наземных прототипов робота и системы управления, а также изготовление аппаратуры робота;
Второй этап — проведение КЭ на МКС с использованием созданного лётного образца робота, установленного внутри РС МКС;
Третий этап — проведение КЭ на МКС с использованием созданного летного образца робота, установленного снаружи РС МКС.
— Чем интересен такой эксперимент для науки?
— Научная новизна космического эксперимента «Теледроид» заключается:
- в создании первого отечественного антропоморфного робота, предназначенного для эксплуатации в условиях открытого космического пространства;
- в разработке методик дистанционного копирующего управления антропоморфным роботом с борта МКС и с Земли;
- будут получены данные о возможностях и особенностях интерактивного копирующего управления роботом космонавтом-оператором в условиях невесомости при помощи костюма управления (экзоскелета) с силомоментной обратной связью и тактильным очувствлением;
- будут получены данные о взаимодействии космонавта с антропоморфным роботом в условиях орбитального полёта при совместном выполнении внекорабельной деятельности;
- будут получены количественные и качественные характеристики процессов выполнения антропоморфным роботом различных операций ВКД на МКС с использованием штатного бортового инструментария при копирующем управлении роботом с борта МКС и с Земли.
Дальнейшее развитие технологий связано с разработкой и экспериментальной отработкой АРП, предназначенных для роботизированной поддержки деятельности космонавтов в перспективной системе средств обитания (ПССО). Согласно концепции развития российской пилотируемой космонавтики, ПССО — это совокупность обитаемых (либо посещаемых) орбитальных модулей (станций), а также напланетных обитаемых (либо посещаемых) модулей (баз, поселений), предназначенных для обеспечения требуемой для жизнедеятельности человека среды обитания.
Смотрите также:
Подписывайтесь на АиФ в  MAX MAX
|



